
Найти собственные значения матрицы, решив характеристическое уравнение \[{\lambda ^2} - \left( {{a_{11}} + {a_{22}}} \right)\lambda + {a_{11}}{a_{22}} - {a_{12}}{a_{21}} = 0.\]
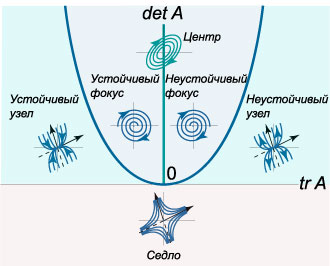
Определить тип положения равновесия и характер устойчивости. Примечание: Тип положения равновесия можно также определить на основе бифуркационной диаграммы (рис.\(17\)), зная след и определитель матрицы: \[ {\text{tr}\,A = {a_{11}} + {a_{22}},}\;\; {\det A = \left| {\begin{array}{*{20}{c}} {{a_{11}}}&{{a_{12}}}\\ {{a_{21}}}&{{a_{22}}} \end{array}} \right| } = {{a_{11}}{a_{22}} - {a_{12}}{a_{21}}.} \]
Найти уравнение изоклин: \[ {\frac{{dx}}{{dt}} = {a_{11}}x + {a_{12}}y}\;\; {\left( \text{вертикальная изоклина} \right),} \] \[ {\frac{{dy}}{{dt}} = {a_{21}}x + {a_{22}}y}\;\; {\left( \text{горизонтальная изоклина} \right).} \]
Если положение равновесия является узлом или седлом, то необходимо вычислить собственные векторы и начертить параллельные им асимптоты, проходящие через начало координат.
Схематически начертить фазовый портрет.
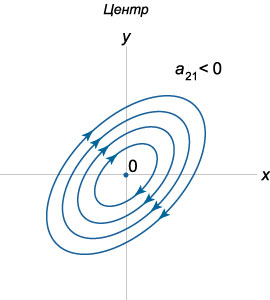
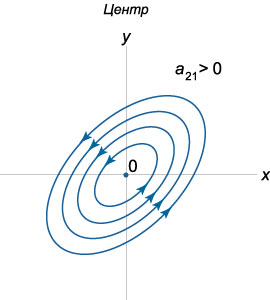
Показать направление движения по фазовым траекториям (это зависит от устойчивости или неустойчивости точки равновесия). В случае фокуса следует определить направление закручивания траекторий. Это можно сделать, вычислив вектор скорости \(\left( {\large\frac{{dx}}{{dt}}\normalsize,\large\frac{{dy}}{{dt}}\normalsize} \right)\)в произвольной точке, например, в точке \(\left( {1,0} \right).\) Аналогичным образом определяется направление движения, если положение равновесия является центром.
Запишем матрицу систему и вычислим ее определитель: \[ {A = \left( {\begin{array}{*{20}{r}} { - 1}&0\\ 2&{ - 2} \end{array}} \right),}\;\; {\det A = \left| {\begin{array}{*{20}{r}} { - 1}&0\\ 2&{ - 2} \end{array}} \right| = 2 \ne 0.} \] Поскольку \(\det A \ne 0,\) то данная система имеет единственное положение равновесия в точке \(\mathbf{X} = \mathbf{0}.\) Найдем собственные значения матрицы \(A:\) \[ {\det \left( {A - \lambda I} \right) = 0,}\;\; {\Rightarrow \left| {\begin{array}{*{20}{c}} { - 1 - \lambda }&0\\ 2&{ - 2 - \lambda } \end{array}} \right| = 0,}\;\; {\Rightarrow \left( {\lambda + 1} \right)\left( {\lambda + 2} \right) = 0,}\;\; {\Rightarrow {\lambda _1} = - 1,\;{\lambda _2} = - 2.} \]
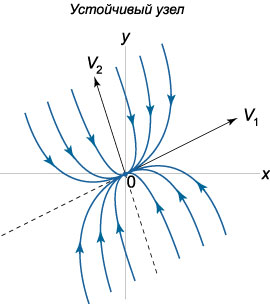
Оба собственных значения действительны и отрицательны, поэтому точка равновесия \(\mathbf{X} = \mathbf{0}\) представляет собой устойчивый узел.
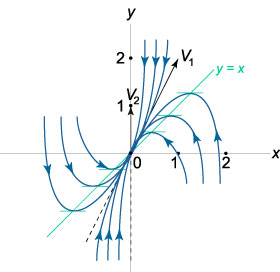
Определим уравнения главных изоклин, т.е. прямых, которые являются касательными к фазовым траекториям. Уравнение вертикальной изоклины имеет вид: \[\frac{{dx}}{{dt}} = - x = 0\;\;\text{или}\;\;x = 0.\] Уравнение горизонтальной изоклины записывается как \[\frac{{dy}}{{dt}} = 2x - 2y = 0\;\;\text{или}\;\;y = x.\]
Найдем уравнения асимптот. Это можно сделать, вычислив собственные векторы \({\mathbf{V}_1},\) \({\mathbf{V}_2}\) матрицы\(A:\) \[ {\left( {A - {\lambda _1}I} \right){\mathbf{V}_1} = \mathbf{0},}\;\; {\Rightarrow \left( {\begin{array}{*{20}{c}} { - 1 + 1}&0\\ 2&{ - 2 + 1} \end{array}} \right)\left( {\begin{array}{*{20}{c}} {{V_{11}}}\\ {{V_{21}}} \end{array}} \right) = \mathbf{0},}\;\; {\Rightarrow \left( {\begin{array}{*{20}{r}} 0&0\\ 2&{ - 1} \end{array}} \right)\left( {\begin{array}{*{20}{c}} {{V_{11}}}\\ {{V_{21}}} \end{array}} \right) = \mathbf{0},}\;\; {\Rightarrow 2{V_{11}} - {V_{21}} = 0,}\;\; {\Rightarrow {V_{11}} = 1,\;{V_{21}} = 2,}\;\; {\Rightarrow {\mathbf{V}_1} = \left( {\begin{array}{*{20}{c}} {{V_{11}}}\\ {{V_{21}}} \end{array}} \right) = \left( {\begin{array}{*{20}{c}} 1\\ 2 \end{array}} \right);} \] \[ {\left( {A - {\lambda _2}I} \right){\mathbf{V}_2} = \mathbf{0},}\;\; {\Rightarrow \left( {\begin{array}{*{20}{c}} { - 1 + 2}&0\\ 2&{ - 2 + 2} \end{array}} \right)\left( {\begin{array}{*{20}{c}} {{V_{12}}}\\ {{V_{22}}} \end{array}} \right) = \mathbf{0},}\;\; {\Rightarrow \left( {\begin{array}{*{20}{c}} 1&0\\ 2&0 \end{array}} \right)\left( {\begin{array}{*{20}{c}} {{V_{12}}}\\ {{V_{22}}} \end{array}} \right) = \mathbf{0},}\;\; {\Rightarrow \left\{ {\begin{array}{*{20}{l}} {1 \cdot {V_{12}} + 0 \cdot {V_{22}} = 0}\\ {2 \cdot {V_{12}} + 0 \cdot {V_{22}} = 0} \end{array}} \right.,}\;\; {\Rightarrow {V_{12}} = 0,\;{V_{22}} = 1,}\;\; {\Rightarrow {\mathbf{V}_2} = \left( {\begin{array}{*{20}{c}} {{V_{12}}}\\ {{V_{22}}} \end{array}} \right) = \left( {\begin{array}{*{20}{c}} 0\\ 1 \end{array}} \right).} \]
Изобразим на плоскости собственные векторы \({\mathbf{V}_1},\) \({\mathbf{V}_2},\) горизонтальную изоклину \(y = x\) и построим схематический фазовый портрет системы (рис.\(18\)). Фазовые траектории будут приближаться к нулю, касаясь прямой, направленной вдоль вектора \({\mathbf{V}_1},\) поскольку этому собственному вектору соответствует наименьшее по модулю собственное значение: \(\left| {{\lambda _1}} \right| = 1.\)
Решим данную задачу без вычисления собственных значений и собственных векторов.
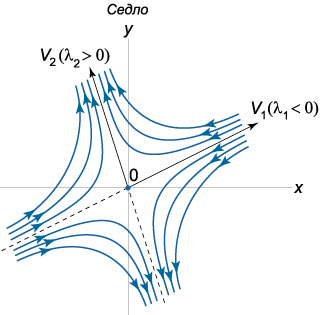
Поскольку определитель \(\det A<0,\) то нулевое положение равновесия является седлом. Это следует из бифуркационной диаграммы на рис.\(17\).
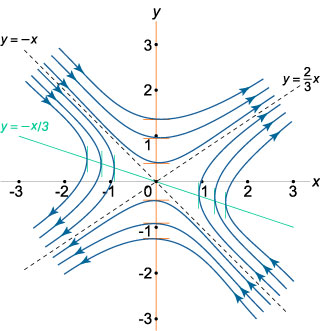
Определим уравнения изоклин. Вертикальная изоклина описывается следующей линейной функцией: \[\frac{{dx}}{{dt}} = x + 3y = 0,\;\; \Rightarrow y = - \frac{x}{3}.\] Уравнение горизонтальной изоклины имеет вид: \[\frac{{dy}}{{dt}} = 2x = 0,\;\; \Rightarrow x = 0\;\left( {\text{ось}\,Oy} \right).\]
Найдем уравнение сепаратрис, которые имеют вид \(y = kx.\) Подставляя это в исходную систему, получаем квадратное уравнение для коэффициента \(k:\) \[ {\left\{ \begin{array}{l} \frac{{dx}}{{dt}} = x + 3y\\ \frac{{dy}}{{dt}} = 2x \end{array} \right.,}\;\; {\Rightarrow \left\{ \begin{array}{l} \frac{{dx}}{{dt}} = x + 3kx\\ \frac{{kdx}}{{dt}} = 2x \end{array} \right.,}\;\; {\Rightarrow 2x = k\left( {x + 3kx} \right),}\;\; {\Rightarrow 3{k^2}x + kx - 2x = 0,}\;\; {\Rightarrow 3{k^2} + k - 2 = 0,}\;\; {\Rightarrow D = 24,\;{k_{1,2}} = \frac{{ - 1 \pm 5}}{6} = - 1,\;\frac{2}{3}.} \] Итак, уравнения сепаратрис выглядят так: \[y = - x,\;\;y = \frac{2}{3}x.\]
Изобразим на фазовой плоскости найденные изоклины и сепаратрисы и схематически начертим фазовые траектории (рис.\(19\)).
Определим направление движения вдоль фазовых траекторий. Возьмем, к примеру, точку \(\left( {1,0} \right)\) и вычислим производную \(\large\frac{{dy}}{{dt}}\normalsize\) в этой точке: \[\frac{{dy}}{{dt}}\left( {1,0} \right) = 2 \cdot 1 = 2>0.\] Поскольку производная \({\large\frac{{dy}}{{dt}}\normalsize}>0,\) то при увеличении времени \(t\) точка пересекает ось \(Ox\) в направлении снизу вверх. Отметим это на фазовой плоскости. Далее, исходя из симметрии, можно указать направления движения и по остальным траекториям (рис.\(19\)).
Вычислим собственные значения матрицы \(A:\) \[ {\left| {\begin{array}{*{20}{c}} {3 - \lambda }&{ - 4}\\ 2&{ - 1 - \lambda } \end{array}} \right| = 0,}\;\; {\Rightarrow \left( {\lambda - 3} \right)\left( {\lambda + 1} \right) + 8 = 0,}\;\; {\Rightarrow {\lambda ^2} - 2\lambda + 5 = 0,\;D = - 16,}\;\; {\Rightarrow {\lambda _{1,2}} = \frac{{2 \pm 4i}}{2} = 1 \pm 2i.} \]
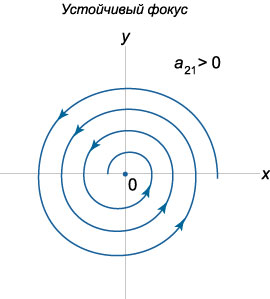
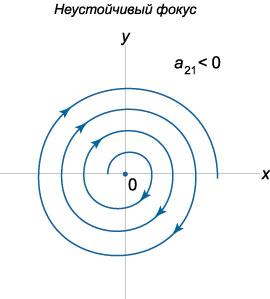
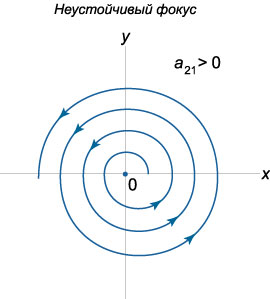
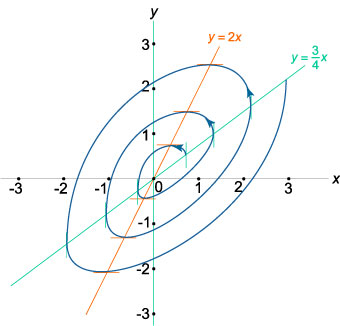
Собственные значения \({\lambda_1},\) \({\lambda_2}\) представляют собой комплексно-сопряженную пару чисел с положительной действительной частью. Поэтому положение равновесия в начале координат является неустойчивым фокусом.
Найдем уравнения изоклин. Вертикальная изоклина описывается следующим уравнением: \[\frac{{dx}}{{dt}} = 3x - 4y = 0,\;\; \Rightarrow y = \frac{3}{4}x.\] Горизонтальная изоклина определяется уравнением: \[\frac{{dy}}{{dt}} = 2x - y = 0,\;\; \Rightarrow y = 2x.\]
Выясним направление закручивания спиралей, вычислив производную \(\large\frac{{dy}}{{dt}}\normalsize\) в точке \(\left( {1,0} \right):\) \[\frac{{dy}}{{dt}}\left( {1,0} \right) = 2 \cdot 1 - 0 = 2>0.\] Таким образом, спирали закручиваются против часовой стрелки.
С учетом найденных данных построим схематический фазовый портрет системы (рис.\(20\)).
При \(a \in \left( { - \infty , - 1} \right)\) существует устойчивый узел в начале координат;
При \(a = -1\) любая точка прямой \(y = x\) является устойчивым положением равновесия;
При \(a \in \left( { - 1, 1} \right)\) существует седло в начале координат;
При \(a = 1\) любая точка прямой \(y = -x\) является неустойчивым положением равновесия;
При \(a \in \left( {1, \infty} \right)\) существует неустойчивый узел в начале координат.