Физические приложения тройных интегралов
Масса и статические моменты тела
Пусть тело занимает объем \(U\) и его объемная плотность в точке \(M\left( {x,y,z} \right)\) задана функцией
\(\rho\left( {x,y,z} \right).\) Тогда масса тела \(m\) вычисляется с помощью тройного интеграла:
\[m = \iiint\limits_U {\rho \left( {x,y,z} \right)dxdydz} .\]
Статические моменты тела относительно координатных плоскостей \(Oxy, Oxz, Oyz\)
выражаются формулами
\[
{{M_{xy}} = \int\limits_U {z\rho \left( {x,y,z} \right)dxdydz} ,}\;\;
{{M_{yz}} = \int\limits_U {x\rho \left( {x,y,z} \right)dxdydz} ,}\;\;
{{M_{xz}} = \int\limits_U {y\rho \left( {x,y,z} \right)dxdydz} .}
\]
Координаты центра тяжести тела вычисляются по формулам:
\[
{\bar x = \frac{{{M_{yz}}}}{m} = \frac{{\iiint\limits_U {x\rho \left( {x,y,z} \right)dxdydz} }}{{\iiint\limits_U {\rho \left( {x,y,z} \right)dxdydz} }},}\;\;
{\bar y = \frac{{{M_{xz}}}}{m} = \frac{{\iiint\limits_U {y\rho \left( {x,y,z} \right)dxdydz} }}{{\iiint\limits_U {\rho \left( {x,y,z} \right)dxdydz} }},}\;\;
{\bar z = \frac{{{M_{xy}}}}{m} = \frac{{\iiint\limits_U {z\rho \left( {x,y,z} \right)dxdydz} }}{{\iiint\limits_U {\rho \left( {x,y,z} \right)dxdydz} }}.}
\]
Если тело является однородным с плотностью \({\rho \left( {x,y,z} \right)} = 1\) для точек \({M\left( {x,y,z} \right)}\) в области \(U,\)
то центр тяжести тела зависит только от геометрии тела и называется центроидом.
Моменты инерции тела
Моменты инерции тела относительно координатных плоскостей \(Oxy, Oxz, Oyz\)
определяются выражениями
\[
{{I_{xy}} = \iiint\limits_U {{z^2}\rho \left( {x,y,z} \right)dxdydz} ,}\;\;
{{I_{yz}} = \iiint\limits_U {{x^2}\rho \left( {x,y,z} \right)dxdydz} ,}\;\;
{{I_{xz}} = \iiint\limits_U {{y^2}\rho \left( {x,y,z} \right)dxdydz},}
\]
а моменты инерции тела относительно координатных осей \(Ox, Oy, Oz\) вычисляются
по формулам
\[
{{I_x} = \iiint\limits_U {\left( {{y^2} + {z^2}} \right)\rho \left( {x,y,z} \right)dxdydz} ,}\;\;
{{I_y} = \iiint\limits_U {\left( {{x^2} + {z^2}} \right)\rho \left( {x,y,z} \right)dxdydz} ,}\;\;
{{I_z} = \iiint\limits_U {\left( {{x^2} + {y^2}} \right)\rho \left( {x,y,z} \right)dxdydz} .}
\]
Как видно, справедливы соотношения
\[
{{I_x} = {I_{xy}} + {I_{xz}},}\;\;
{{I_y} = {I_{xy}} + {I_{yz}},}\;\;
{{I_z} = {I_{xz}} + {I_{yz}}.}
\]
Моментом инерции тела относительно начала координат называется интеграл
\[{I_0} = \iiint\limits_U {\left( {{x^2} + {y^2} + {z^2}} \right)\rho \left( {x,y,z} \right)dxdydz}.\]
Момент инерции относительно начала координат можно выразить через моменты инерции относительно координатных плоскостей:
\[{I_0} = {I_{xy}} + {I_{yz}} + {I_{xz}}.\]
Тензор инерции
Используя рассмотренные выше \(6\) чисел \({I_x},{I_y},{I_z},{I_{xy}},{I_{xz}},{I_{yz}},\)
можно составить так называемую матрицу инерции
или тензор инерции тела:
\[I = \left( {\begin{array}{*{20}{c}}
{{I_x}}&{ - {I_{xy}}}&{ - {I_{xz}}}\\
{ - {I_{xy}}}&{{I_y}}&{ - {I_{yz}}}\\
{ - {I_{xz}}}&{ - {I_{yz}}}&{{I_z}}
\end{array}} \right).\]
Данный тензор является симметричным, и, следовательно, его можно привести к диагональному виду при определенном выборе осей
\(Ox', Oy', Oz'.\) Значения диагональных элементов (после приведения тензора к диагональному виду) называются
главными моментами инерции, а указанные направления −собственными векторами или
главными осями инерции.
Если тело вращается вокруг оси, не совпадаюшей с главной осью инерции, то оно будет испытывать вибрации при высоких скоростях вращения.
Поэтому, при конструировании таких устройств необходимо, чтобы ось вращения совпадала с одной из главных осей инерции. Например, при
замене шин автомобиля проводится их балансировка: небольшие грузики добавляются к колесам, чтобы обеспечить совпадение оси вращения с главной
осью инерции и исключить вибрации.
Гравитационный потенциал и сила тяготения
Ньютоновым потенциалом тела в точке \(P\left( {x,y,z} \right)\)
называется интеграл
\[u\left( {x,y,z} \right) = \iiint\limits_U {\rho \left( {\xi ,\eta ,\zeta } \right)\frac{{d\xi d\eta d\zeta }}{r}} ,\]
где \({\rho \left( {\xi ,\eta ,\zeta } \right)}\) − плотность тела, и
\(r = \sqrt {{{\left( {\xi - x} \right)}^2} + {{\left( {\eta - y} \right)}^2} + {{\left( {\zeta - z} \right)}^2}} .\)
Интегрирование выполняется по всему объему тела. Зная потенциал, можно вычислить силу притяжения материальной точки массы \(m\)
и заданного распределенного тела с плотностью \({\rho \left( {\xi ,\eta ,\zeta } \right)}\) по формуле
\[\mathbf{F} = - Gm\,\mathbf{\text{grad}}\,u,\]
где \(G\) − гравитационная постоянная.
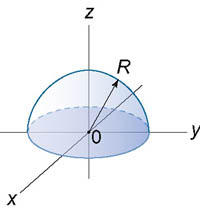
Пример 1
Найти центроид однородного полушара радиусом \(R.\)
 В данной системе координат будем искать координаты центроида (центра тяжести) тела.
Очевидно, что в силу симметрии
\[\bar x = \bar y = 0.\]
Вычислим координату центра тяжести \(\bar z\) по формуле
\[
{\bar z = \frac{{{M_{xy}}}}{m} }
= {\frac{{\iiint\limits_U {z\rho \left( {x,y,z} \right)dxdydz} }}{{\iiint\limits_U {\rho \left( {x,y,z} \right)dxdydz} }}.}
\]
Поскольку полушар однородный, то полагаем \(\rho \left( {x,y,z} \right) = {\rho _0}.\) Тогда
\[\require{cancel}
{\bar z = \frac{{{\bcancel{\rho _0}}\iiint\limits_U {zdxdydz} }}{{{\bcancel{\rho _0}}\iiint\limits_U {dxdydz} }} }
= {\frac{{\iiint\limits_U {zdxdydz} }}{{\iiint\limits_U {dxdydz} }} }
= {\frac{{\iiint\limits_U {zdxdydz} }}{V}.}
\]
В знаменателе через \(V\) обозначен объем полушара, равный
\[V = \frac{1}{2}\left( {\frac{4}{3}\pi {R^3}} \right) = \frac{2}{3}\pi {R^3}.\]
Остается вычислить тройной интеграл \({\iiint\limits_U {zdxdydz} }.\) Для этого перейдем к сферическим координатам.
При этом радиальную координату будем обозначать через \(r\) − чтобы не путать с плотностью \(\rho.\) Получаем:
\[
{\iiint\limits_U {zdxdydz} }
= {\iiint\limits_{U'} {r\cos \theta {r^2}\sin \theta drd\varphi d\theta } }
= {\int\limits_0^{2\pi } {d\varphi } \int\limits_0^R {{r^3}dr} \int\limits_0^{\large\frac{\pi }{2}\normalsize} {\cos \theta \sin \theta d\theta } }
= {\int\limits_0^{2\pi } {d\varphi } \int\limits_0^R {{r^3}dr} \int\limits_0^{\large\frac{\pi }{2}\normalsize} {\sin \theta d\left( {\sin \theta } \right)} }
= {\int\limits_0^{2\pi } {d\varphi } \int\limits_0^R {{r^3}dr} \cdot \left[ {\left. {\left( {\frac{{{{\sin }^2}\theta }}{2}} \right)} \right|_{\theta = 0}^{\theta = \large\frac{\pi }{2}\normalsize}} \right] }
= {\int\limits_0^{2\pi } {d\varphi } \int\limits_0^R {{r^3}dr} \cdot \frac{1}{2} = \frac{1}{2}\int\limits_0^{2\pi } {d\varphi } \cdot \left[ {\left. {\left( {\frac{{{r^4}}}{4}} \right)} \right|_0^R} \right] }
= {\frac{{{R^4}}}{8}\int\limits_0^{2\pi } {d\varphi } }
= {\frac{{{R^4}}}{8} \cdot 2\pi }
= {\frac{{\pi {R^4}}}{4}.}
\]
Таким образом, координата центра тяжести \(\bar z\) равна
\[
{\bar z = \frac{{\iiint\limits_U {zdxdydz} }}{V} }
= {\frac{{\frac{1}{4}\pi {R^4}}}{{\frac{2}{4}\pi {R^3}}} = \frac{{3R}}{8}.}
\]
В данной системе координат будем искать координаты центроида (центра тяжести) тела.
Очевидно, что в силу симметрии
\[\bar x = \bar y = 0.\]
Вычислим координату центра тяжести \(\bar z\) по формуле
\[
{\bar z = \frac{{{M_{xy}}}}{m} }
= {\frac{{\iiint\limits_U {z\rho \left( {x,y,z} \right)dxdydz} }}{{\iiint\limits_U {\rho \left( {x,y,z} \right)dxdydz} }}.}
\]
Поскольку полушар однородный, то полагаем \(\rho \left( {x,y,z} \right) = {\rho _0}.\) Тогда
\[\require{cancel}
{\bar z = \frac{{{\bcancel{\rho _0}}\iiint\limits_U {zdxdydz} }}{{{\bcancel{\rho _0}}\iiint\limits_U {dxdydz} }} }
= {\frac{{\iiint\limits_U {zdxdydz} }}{{\iiint\limits_U {dxdydz} }} }
= {\frac{{\iiint\limits_U {zdxdydz} }}{V}.}
\]
В знаменателе через \(V\) обозначен объем полушара, равный
\[V = \frac{1}{2}\left( {\frac{4}{3}\pi {R^3}} \right) = \frac{2}{3}\pi {R^3}.\]
Остается вычислить тройной интеграл \({\iiint\limits_U {zdxdydz} }.\) Для этого перейдем к сферическим координатам.
При этом радиальную координату будем обозначать через \(r\) − чтобы не путать с плотностью \(\rho.\) Получаем:
\[
{\iiint\limits_U {zdxdydz} }
= {\iiint\limits_{U'} {r\cos \theta {r^2}\sin \theta drd\varphi d\theta } }
= {\int\limits_0^{2\pi } {d\varphi } \int\limits_0^R {{r^3}dr} \int\limits_0^{\large\frac{\pi }{2}\normalsize} {\cos \theta \sin \theta d\theta } }
= {\int\limits_0^{2\pi } {d\varphi } \int\limits_0^R {{r^3}dr} \int\limits_0^{\large\frac{\pi }{2}\normalsize} {\sin \theta d\left( {\sin \theta } \right)} }
= {\int\limits_0^{2\pi } {d\varphi } \int\limits_0^R {{r^3}dr} \cdot \left[ {\left. {\left( {\frac{{{{\sin }^2}\theta }}{2}} \right)} \right|_{\theta = 0}^{\theta = \large\frac{\pi }{2}\normalsize}} \right] }
= {\int\limits_0^{2\pi } {d\varphi } \int\limits_0^R {{r^3}dr} \cdot \frac{1}{2} = \frac{1}{2}\int\limits_0^{2\pi } {d\varphi } \cdot \left[ {\left. {\left( {\frac{{{r^4}}}{4}} \right)} \right|_0^R} \right] }
= {\frac{{{R^4}}}{8}\int\limits_0^{2\pi } {d\varphi } }
= {\frac{{{R^4}}}{8} \cdot 2\pi }
= {\frac{{\pi {R^4}}}{4}.}
\]
Таким образом, координата центра тяжести \(\bar z\) равна
\[
{\bar z = \frac{{\iiint\limits_U {zdxdydz} }}{V} }
= {\frac{{\frac{1}{4}\pi {R^4}}}{{\frac{2}{4}\pi {R^3}}} = \frac{{3R}}{8}.}
\]
Решение.
Введем систему координат таким образом, чтобы полушар был расположен при \(z \ge 0\)
и имел центр в начале координат (рисунок \(1\)).
Рис.1
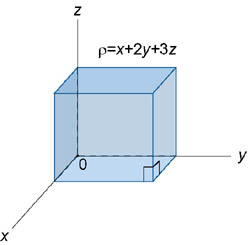
Рис.2
Пример 2
Определить массу и координаты центра тяжести единичного куба с плотностью
\(\rho \left( {x,y,z} \right) = x + 2y + 3z\) (рисунок\(2\)).
Решение.
Сначала вычислим массу куба:
\[
{m = \iiint\limits_U {\rho \left( {x,y,z} \right)dxdydz} }
= {\int\limits_0^1 {dx} \int\limits_0^1 {dy} \int\limits_0^1 {\left( {x + 2y + 3z} \right)dz} }
= {\int\limits_0^1 {dx} \int\limits_0^1 {dy} \cdot \left[ {\left. {\left( {xz + 2yz + \frac{{3{z^2}}}{2}} \right)} \right|_{z = 0}^{z = 1}} \right] }
= {\int\limits_0^1 {dx} \int\limits_0^1 {\left( {x + 2y + \frac{3}{2}} \right)dy} }
= {\int\limits_0^1 {dx} \cdot \left[ {\left. {\left( {xy + {y^2} + \frac{3}{2}y} \right)} \right|_{y = 0}^{y = 1}} \right] }
= {\int\limits_0^1 {\left( {x + 1 + \frac{3}{2}} \right)dx} }
= {\int\limits_0^1 {\left( {x + \frac{5}{2}} \right)dx} }
= {\left. {\left( {\frac{{{x^2}}}{2} + \frac{5}{2}x} \right)} \right|_0^1 }
= {\frac{1}{2} + \frac{5}{2} = 3.}
\]
Теперь вычислим статические моменты \({M_{xy}},{M_{xz}},{M_{yz}}.\)
\[
{{M_{xy}} = \iiint\limits_U {z\rho \left( {x,y,z} \right)dxdydz} }
= {\int\limits_0^1 {dx} \int\limits_0^1 {dy} \int\limits_0^1 {z\left( {x + 2y + 3z} \right)dz} }
= {\int\limits_0^1 {dx} \int\limits_0^1 {dy} \int\limits_0^1 {\left( {xz + 2zy + 3{z^2}} \right)dz} }
= {\int\limits_0^1 {dx} \int\limits_0^1 {dy} \cdot \left[ {\left. {\left( {\left( {x + 2y} \right)\frac{{{z^2}}}{2} + {z^3}} \right)} \right|_{z = 0}^{z = 1}} \right] }
= {\int\limits_0^1 {dx} \int\limits_0^1 {\left( {\frac{1}{2}\left( {x + 2y} \right) + 1} \right)dy} }
= {\frac{1}{2}\int\limits_0^1 {dx} \int\limits_0^1 {\left( {x + 2y + 2} \right)dy} }
= {\frac{1}{2}\int\limits_0^1 {dx} \cdot \left[ {\left. {\left( {xy + {y^2} + 2y} \right)} \right|_{y = 0}^{y = 1}} \right] }
= {\frac{1}{2}\int\limits_0^1 {\left( {x + 3} \right)dx} }
= {\frac{1}{2}\left[ {\left. {\left( {\frac{{{x^2}}}{2} + 3x} \right)} \right|_0^1} \right] }
= {\frac{1}{2}\left( {\frac{1}{2} + 3} \right) }
= {\frac{7}{4}.}
\]
Аналогично находим моменты \({M_{xz}}\) и \({M_{yz}}:\)
\[
{{M_{xz}} = \iiint\limits_U {y\rho \left( {x,y,z} \right)dxdydz} }
= {\int\limits_0^1 {dx} \int\limits_0^1 {dy} \int\limits_0^1 {y\left( {x + 2y + 3z} \right)dz} }
= {\int\limits_0^1 {dx} \int\limits_0^1 {dy} \int\limits_0^1 {\left( {yx + 2{y^2} + 3yz} \right)dz} }
= {\int\limits_0^1 {dx} \int\limits_0^1 {dy} \cdot \left[ {\left. {\left( {yxz + 2{y^2}z + \frac{{3y{z^2}}}{2}} \right)} \right|_{z = 0}^{z = 1}} \right] }
= {\int\limits_0^1 {dx} \int\limits_0^1 {\left( {yx + 2{y^2} + \frac{{3y}}{2}} \right)dy} }
= {\int\limits_0^1 {dx} \cdot \left[ {\left. {\left( {\frac{{x{y^2}}}{2} + \frac{{2{y^3}}}{3} + \frac{{3{y^2}}}{4}} \right)} \right|_{y = 0}^{y = 1}} \right] }
= {\int\limits_0^1 {\left( {\frac{x}{2} + \frac{2}{3} + \frac{3}{4}} \right)dx} }
= {\int\limits_0^1 {\left( {\frac{x}{2} + \frac{{17}}{{12}}} \right)dx} }
= {\left. {\left( {\frac{{{x^2}}}{4} + \frac{{17x}}{{12}}} \right)} \right|_0^1 }
= {\frac{1}{4} + \frac{{17}}{{12}} }
= {\frac{{20}}{{12}} = \frac{5}{3}.}
\]
\[
{{M_{yz}} = \iiint\limits_U {x\rho \left( {x,y,z} \right)dxdydz} }
= {\int\limits_0^1 {dx} \int\limits_0^1 {dy} \int\limits_0^1 {x\left( {x + 2y + 3z} \right)dz} }
= {\int\limits_0^1 {dx} \int\limits_0^1 {dy} \int\limits_0^1 {\left( {{x^2} + 2xy + 3xz} \right)dz} }
= {\int\limits_0^1 {dx} \int\limits_0^1 {dy} \cdot \left[ {\left. {\left( {{x^2}z + 2xyz + \frac{{3x{z^2}}}{2}} \right)} \right|_{z = 0}^{z = 1}} \right] }
= {\int\limits_0^1 {dx} \int\limits_0^1 {\left( {{x^2} + 2xy + \frac{{3x}}{2}} \right)dy} }
= {\int\limits_0^1 {dx} \cdot \left[ {\left. {\left( {{x^2}y + x{y^2} + \frac{{3xy}}{2}} \right)} \right|_{y = 0}^{y = 1}} \right] }
= {\int\limits_0^1 {\left( {{x^2} + x + \frac{{3x}}{2}} \right)dx} }
= {\int\limits_0^1 {\left( {{x^2} + \frac{{5x}}{2}} \right)dx} }
= {\left. {\left( {\frac{{{x^3}}}{3} + \frac{{5{x^2}}}{4}} \right)} \right|_0^1 }
= {\frac{1}{3} + \frac{5}{4} = \frac{{19}}{{12}}.}
\]
Вычисляем координаты центра тяжести куба:
\[
{\bar x = \frac{{{M_{yz}}}}{m} = \frac{{\frac{{19}}{{12}}}}{3} = \frac{{19}}{{36}},}\;\;\;
{\bar y = \frac{{{M_{xz}}}}{m} = \frac{{\frac{5}{3}}}{3} = \frac{5}{9} = \frac{{20}}{{36}},}\;\;\;
{\bar z = \frac{{{M_{xy}}}}{m} = \frac{{\frac{7}{4}}}{3} = \frac{7}{{12}} = \frac{{21}}{{36}}.}
\]
Пример 3
Найти массу шара радиуса \(R,\) плотность \(\gamma\) которого пропорциональна квадрату расстояния от центра.
Решение.
По условию, плотность \(\gamma\) задана соотношением \(\gamma = a{r^2},\) где \(a\) − некоторая постоянная,
\(r\) − расстояние от центра. Массу шара удобно вычислить в сферических координатах:
\[
{m = \iiint\limits_U {\gamma \left( {r,\varphi ,\theta } \right){r^2}\sin \theta drd\varphi d\theta } }
= {\iiint\limits_U {a{r^2}{r^2}\sin \theta drd\varphi d\theta } }
= {a\iiint\limits_U {{r^4}\sin \theta drd\varphi d\theta } }
= {a\int\limits_0^{2\pi } {d\varphi } \int\limits_0^R {{r^4}dr} \int\limits_0^\pi {\sin \theta d\theta } }
= {a\int\limits_0^{2\pi } {d\varphi } \int\limits_0^R {{r^4}dr} \cdot \left[ {\left. {\left( { - \cos \theta } \right)} \right|_0^\pi } \right] }
= {a\int\limits_0^{2\pi } {d\varphi } \int\limits_0^R {{r^4}dr} \cdot \left( { - \cos \pi + \cos 0} \right) }
= {2a\int\limits_0^{2\pi } {d\varphi } \int\limits_0^R {{r^4}dr} }
= {2a\int\limits_0^{2\pi } {d\varphi } \cdot \left[ {\left. {\left( {\frac{{{r^5}}}{5}} \right)} \right|_0^R} \right] }
= {\frac{{2a{R^5}}}{5}\int\limits_0^{2\pi } {d\varphi } }
= {\frac{{2a{R^5}}}{5} \cdot 2\pi }
= {\frac{{4a\pi {R^5}}}{5}.}
\]
Пример 4
Найти момент инерции прямого круглого однородного конуса относительно его оси. Конус имеет радиус основания \(R,\) высоту \(H\)
и общую массу \(m\) (рисунок \(3\)).
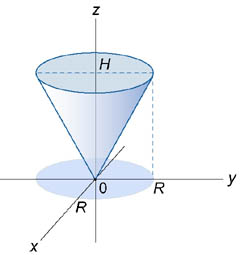
Рис.3
Решение.
Момент инерции тела относительно оси \(Oz\) выражается формулой
\[{I_z} = \iiint\limits_U {\gamma \left( {x,y,z} \right)\left( {{x^2} + {y^2}} \right)dxdydz} .\]
Поскольку конус является однородным, то плотность \(\gamma \left( {x,y,z} \right) = {\gamma _0}\)
можно вынести за знак интеграла:
\[{I_z} = {\gamma _0}\int\limits_U {\left( {{x^2} + {y^2}} \right)dxdydz} .\]
Перейдем к цилиндрическим координатам с помощью замены
\[
{x = r\cos \varphi ,}\;\;
{y = r\sin \varphi ,}\;\;
{\Rightarrow {x^2} + {y^2} = {r^2},}\;\;
{dxdydz = rdrd\varphi dz.}
\]
Новые переменные изменяются в пределах
\[
{0 \le r \le R,}\;\;
{0 \le \varphi \le 2\pi ,}\;\;
{r\frac{H}{R} \le z \le H.}
\]
Тогда момент инерции равен
\[
{{I_z} = {\gamma _0}\int\limits_0^{2\pi } {d\varphi } \int\limits_0^R {{r^3}dr} \int\limits_{r\frac{H}{R}}^H {dz} }
= {{\gamma _0}\int\limits_0^{2\pi } {d\varphi } \int\limits_0^R {{r^3}dr} \cdot \left[ {\left. z \right|_{r\frac{H}{R}}^H} \right] }
= {{\gamma _0}\int\limits_0^{2\pi } {d\varphi } \int\limits_0^R {{r^3}\left( {H - r\frac{H}{R}} \right)dr} }
= {{\gamma _0}H\int\limits_0^{2\pi } {d\varphi } \int\limits_0^R {\left( {{r^3} - \frac{{{r^4}}}{R}} \right)dr} }
= {{\gamma _0}H\int\limits_0^{2\pi } {d\varphi } \cdot \left[ {\left. {\left( {\frac{{{r^4}}}{4} - \frac{{{r^5}}}{{5R}}} \right)} \right|_0^R} \right] }
= {{\gamma _0}H\int\limits_0^{2\pi } {\left( {\frac{{{R^4}}}{4} - \frac{{{R^4}}}{5}} \right)d\varphi } }
= {\frac{{{\gamma _0}H{R^4}}}{{20}}\int\limits_0^{2\pi } {d\varphi } }
= {\frac{{{\gamma _0}H{R^4}}}{{20}} \cdot 2\pi }
= {\frac{{{\gamma _0}\pi H{R^4}}}{{10}}.}
\]
Выразим плотность \({\gamma _0}\) через известную массу конуса \(m.\) Так как
\[
{m = {\gamma _0}V,}\;\;
{V = \frac{1}{3}\pi {R^2}H,}
\]
то, следовательно
\[
{{\gamma _0} = \frac{m}{V} }
= {\frac{m}{{\frac{1}{3}\pi {R^2}H}} }
= {\frac{{3m}}{{\pi {R^2}H}}.}
\]
Окончательно получаем
\[
{{I_z} = \frac{{{\gamma _0}\pi H{R^4}}}{{10}} }
= {\frac{{3m}}{{\bcancel{\pi} {R^2}\bcancel{H}}} \cdot \frac{{\bcancel{\pi} \bcancel{H}{R^4}}}{{10}} }
= {\frac{{3m{R^2}}}{{10}}.}
\]
Интересно, что момент инерции конуса не зависит от его высоты.
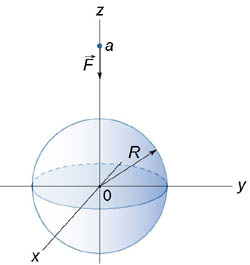
Пример 5
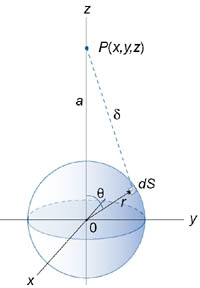
С какой силой притягивает однородный шар массы \(M\) материальную точку массы \(m\), расположенную на
расстоянии \(a\) от центра шара \(\left( {a>R} \right)?\)
 Решим задачу следующим образом. Сначала вычислим потенциал шара, а затем найдем силу притяжения материальной точки и шара.
При этом для нахождения потенциала шара вместо вычисления тройного интеграла технически удобно сначала определить потенциал сферы (через поверхностный интеграл), а затем уже получить результат для шара
(выполнив еще одно интегрирование).
Итак, вычислим потенциал сферы произвольного радиуса \(r\) \(\left( {r \le R} \right).\)
Выделим на сфере малый участок площадью \(dS,\) как показано на рисунке \(5.\) Масса этого участка равна
\[dM = \rho \left( r \right)drdS,\]
где \(\rho \left( r \right)\) − плотность сферы, а \(d\) − ее толщина. Указанная сфера
создает в точке \(P\) потенциал, равный
\[
{du = \rho \left( r \right)dr\iint\limits_S {\frac{{dS}}{\delta }} }
= {\rho \left( r \right)dr\iint\limits_S {\frac{{dS}}{{\sqrt {{a^2} + {r^2} - 2ar\cos \theta } }}} ,}
\]
где расстояние \(\delta\) от участка \(dS\) до точки \(P\) выражено по теореме косинусов через величины
\(a, r, \theta.\)
Учитывая, что элемент площади равен \(dS = {r^2}\sin \theta d\theta d\varphi,\) получаем
\[
{du = \rho \left( r \right)dr\int\limits_S {\frac{{dS}}{{\sqrt {{a^2} + {r^2} - 2ar\cos \theta } }}} }
= {\rho \left( r \right)dr\int\limits_0^{2\pi } {d\varphi } \int\limits_0^\pi {\frac{{{r^2}\sin \theta d\theta }}{{\sqrt {{a^2} + {r^2} - 2ar\cos \theta } }}} }
= {\rho \left( r \right)dr \cdot 2\pi {r^2}\int\limits_0^\pi {\frac{{\sin \theta d\theta }}{{\sqrt {{a^2} + {r^2} - 2ar\cos \theta } }}} .}
\]
Вычислим отдельно интеграл по переменной \(\theta.\) Сделаем следующую замену: пусть
\[v = {a^2} + {r^2} - 2ar\cos \theta .\]
Тогда
\[
{dv = 2ar\sin \theta d\theta ,}\;\;
{\Rightarrow \sin \theta d\theta = \frac{{dv}}{{2ar}}.}
\]
В результате находим интеграл
\[
{I = \int {\frac{{\sin \theta d\theta }}{{\sqrt {{a^2} + {r^2} - 2ar\cos \theta } }}} }
= {\int {\frac{{dv}}{{2ar\sqrt v }}} = \frac{1}{{ar}}\int {\frac{{dv}}{{2\sqrt v }}} }
= {\frac{{\sqrt v }}{{ar}} }
= {\frac{1}{{ar}}\sqrt {{a^2} + {r^2} - 2ar\cos \theta } .}
\]
Таким образом, потенциал сферы радиуса \(r\) равен
\[
{du = \rho \left( r \right)dr \cdot 2\pi {r^2} \cdot \frac{1}{{ar}}\left[ {\left. {\left( {\sqrt {{a^2} + {r^2} - 2ar\cos \theta } } \right)} \right|_{\theta = 0}^{\theta = \pi }} \right] }
= {\frac{{2\pi r\rho \left( r \right)dr}}{a}\left[ {\sqrt {{a^2} + {r^2} + 2ar} - \sqrt {{a^2} + {r^2} - 2ar} } \right] }
= {\frac{{2\pi r\rho \left( r \right)dr}}{a}\left[ {\sqrt {{{\left( {a + r} \right)}^2}} - \sqrt {{{\left( {a - r} \right)}^2}} } \right] }
= {\frac{{2\pi r\rho \left( r \right)dr}}{a} \cdot 2r }
= {\frac{{4\pi {r^2}\rho \left( r \right)dr}}{a}.}
\]
Теперь можно вычислить потенциал шара радиуса \(R.\) Пусть для простоты плотность шара постоянна и равна \({\rho_0}.\)
Получаем
\[
{u = \int\limits_0^R {du} }
= {\int\limits_0^R {\frac{{4\pi {r^2}{\rho _0}dr}}{a}} }
= {\frac{{4\pi {\rho _0}}}{a}\int\limits_0^R {{r^2}dr} }
= {\frac{{4\pi {\rho _0}}}{a}\left[ {\left. {\left( {\frac{{{r^3}}}{3}} \right)} \right|_0^R} \right] }
= {\frac{{4\pi {\rho _0}{R^3}}}{{3a}}.}
\]
В полученном выражении \({\large\frac{4}{3}\normalsize} \pi {R^3} = V\) − это объем шара, а
\({\rho_0}V =M\) − масса шара. В итоге мы доказали, что потенциал гравитационного поля, создаваемого шаром на расстоянии
\(a\) от центра шара \(\left( {a>R} \right),\) выражается формулой
\[u = \frac{M}{a}.\]
Далее легко найти силу притяжения шара и материальной точки. Поскольку
\[\mathbf{F} = - Gm\,\mathbf{\text{grad}}\,u,\]
то сила численно равна
\[
{F = Gm\frac{{\partial u}}{{\partial z}} }
= {Gm{\left. {\left[ {\frac{\partial }{{\partial z}}\left( {\frac{M}{z}} \right)} \right]} \right|_{z = a}} }
= { - G\frac{{mM}}{{{a^2}}}.}
\]
Знак "минус" означает, что сила направлена в сторону, противоположную оси \(Oz,\) т.е. является силой притяжения.
Как видно, сила притяжения шара и точки имеет такой же вид, как и сила притяжения двух точечных масс! Это один из фундаментальных результатов
в астрофизике и небесной механике. Благодаря этому, планеты и звезды часто можно рассматривать как материальные точки при описании их движения.
Чтобы получить этот результат, Исаак Ньютон был вынужден даже отложить публикацию своих знаменитых "Начал Философии". Возможно трудности были связаны с тем, что
он не использовал сферические координаты при решении этой задачи...
Решим задачу следующим образом. Сначала вычислим потенциал шара, а затем найдем силу притяжения материальной точки и шара.
При этом для нахождения потенциала шара вместо вычисления тройного интеграла технически удобно сначала определить потенциал сферы (через поверхностный интеграл), а затем уже получить результат для шара
(выполнив еще одно интегрирование).
Итак, вычислим потенциал сферы произвольного радиуса \(r\) \(\left( {r \le R} \right).\)
Выделим на сфере малый участок площадью \(dS,\) как показано на рисунке \(5.\) Масса этого участка равна
\[dM = \rho \left( r \right)drdS,\]
где \(\rho \left( r \right)\) − плотность сферы, а \(d\) − ее толщина. Указанная сфера
создает в точке \(P\) потенциал, равный
\[
{du = \rho \left( r \right)dr\iint\limits_S {\frac{{dS}}{\delta }} }
= {\rho \left( r \right)dr\iint\limits_S {\frac{{dS}}{{\sqrt {{a^2} + {r^2} - 2ar\cos \theta } }}} ,}
\]
где расстояние \(\delta\) от участка \(dS\) до точки \(P\) выражено по теореме косинусов через величины
\(a, r, \theta.\)
Учитывая, что элемент площади равен \(dS = {r^2}\sin \theta d\theta d\varphi,\) получаем
\[
{du = \rho \left( r \right)dr\int\limits_S {\frac{{dS}}{{\sqrt {{a^2} + {r^2} - 2ar\cos \theta } }}} }
= {\rho \left( r \right)dr\int\limits_0^{2\pi } {d\varphi } \int\limits_0^\pi {\frac{{{r^2}\sin \theta d\theta }}{{\sqrt {{a^2} + {r^2} - 2ar\cos \theta } }}} }
= {\rho \left( r \right)dr \cdot 2\pi {r^2}\int\limits_0^\pi {\frac{{\sin \theta d\theta }}{{\sqrt {{a^2} + {r^2} - 2ar\cos \theta } }}} .}
\]
Вычислим отдельно интеграл по переменной \(\theta.\) Сделаем следующую замену: пусть
\[v = {a^2} + {r^2} - 2ar\cos \theta .\]
Тогда
\[
{dv = 2ar\sin \theta d\theta ,}\;\;
{\Rightarrow \sin \theta d\theta = \frac{{dv}}{{2ar}}.}
\]
В результате находим интеграл
\[
{I = \int {\frac{{\sin \theta d\theta }}{{\sqrt {{a^2} + {r^2} - 2ar\cos \theta } }}} }
= {\int {\frac{{dv}}{{2ar\sqrt v }}} = \frac{1}{{ar}}\int {\frac{{dv}}{{2\sqrt v }}} }
= {\frac{{\sqrt v }}{{ar}} }
= {\frac{1}{{ar}}\sqrt {{a^2} + {r^2} - 2ar\cos \theta } .}
\]
Таким образом, потенциал сферы радиуса \(r\) равен
\[
{du = \rho \left( r \right)dr \cdot 2\pi {r^2} \cdot \frac{1}{{ar}}\left[ {\left. {\left( {\sqrt {{a^2} + {r^2} - 2ar\cos \theta } } \right)} \right|_{\theta = 0}^{\theta = \pi }} \right] }
= {\frac{{2\pi r\rho \left( r \right)dr}}{a}\left[ {\sqrt {{a^2} + {r^2} + 2ar} - \sqrt {{a^2} + {r^2} - 2ar} } \right] }
= {\frac{{2\pi r\rho \left( r \right)dr}}{a}\left[ {\sqrt {{{\left( {a + r} \right)}^2}} - \sqrt {{{\left( {a - r} \right)}^2}} } \right] }
= {\frac{{2\pi r\rho \left( r \right)dr}}{a} \cdot 2r }
= {\frac{{4\pi {r^2}\rho \left( r \right)dr}}{a}.}
\]
Теперь можно вычислить потенциал шара радиуса \(R.\) Пусть для простоты плотность шара постоянна и равна \({\rho_0}.\)
Получаем
\[
{u = \int\limits_0^R {du} }
= {\int\limits_0^R {\frac{{4\pi {r^2}{\rho _0}dr}}{a}} }
= {\frac{{4\pi {\rho _0}}}{a}\int\limits_0^R {{r^2}dr} }
= {\frac{{4\pi {\rho _0}}}{a}\left[ {\left. {\left( {\frac{{{r^3}}}{3}} \right)} \right|_0^R} \right] }
= {\frac{{4\pi {\rho _0}{R^3}}}{{3a}}.}
\]
В полученном выражении \({\large\frac{4}{3}\normalsize} \pi {R^3} = V\) − это объем шара, а
\({\rho_0}V =M\) − масса шара. В итоге мы доказали, что потенциал гравитационного поля, создаваемого шаром на расстоянии
\(a\) от центра шара \(\left( {a>R} \right),\) выражается формулой
\[u = \frac{M}{a}.\]
Далее легко найти силу притяжения шара и материальной точки. Поскольку
\[\mathbf{F} = - Gm\,\mathbf{\text{grad}}\,u,\]
то сила численно равна
\[
{F = Gm\frac{{\partial u}}{{\partial z}} }
= {Gm{\left. {\left[ {\frac{\partial }{{\partial z}}\left( {\frac{M}{z}} \right)} \right]} \right|_{z = a}} }
= { - G\frac{{mM}}{{{a^2}}}.}
\]
Знак "минус" означает, что сила направлена в сторону, противоположную оси \(Oz,\) т.е. является силой притяжения.
Как видно, сила притяжения шара и точки имеет такой же вид, как и сила притяжения двух точечных масс! Это один из фундаментальных результатов
в астрофизике и небесной механике. Благодаря этому, планеты и звезды часто можно рассматривать как материальные точки при описании их движения.
Чтобы получить этот результат, Исаак Ньютон был вынужден даже отложить публикацию своих знаменитых "Начал Философии". Возможно трудности были связаны с тем, что
он не использовал сферические координаты при решении этой задачи...
Решение.
Без снижения общности материальную точку можно поместить на оси \(Oz\) (рисунок \(4\)), так что ее координата составляет
\(\left( {0,0,a} \right).\)
Рис.4
Рис.5
Пример 6
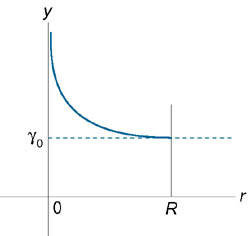
Пусть планета имеет радиус \(R,\) а ее плотность выражается зависимостью
\[\gamma \left( r \right) = \frac{{R + r}}{{2r}}{\gamma _0}.\]
Вычислить массу планеты.
 Массу планеты вычислим с помощью тройного интеграла по формуле:
\[M = \iiint\limits_U {dV} .\]
Переходя к сферическим координатам, получаем
\[
{M = \iiint\limits_U {dV} }
= {\iiint\limits_U {\gamma \left( r \right){r^2}\sin \theta drd\varphi d\theta } }
= {\iiint\limits_U {\frac{{R + r}}{{2r}}{\gamma _0}{r^2}\sin \theta drd\varphi d\theta } }
= {\frac{{{\gamma _0}}}{2}\int\limits_U {\left( {R + r} \right)r\sin \theta drd\varphi d\theta } }
= {\frac{{{\gamma _0}}}{2}\int\limits_0^R {\left( {R + r} \right)rdr} \int\limits_0^{2\pi } {d\varphi } \int\limits_0^\pi {\sin \theta d\theta } }
= {\frac{{{\gamma _0}}}{2}\int\limits_0^R {\left( {R + r} \right)rdr} \int\limits_0^{2\pi } {d\varphi } \cdot \left[ {\left. {\left( { - \cos \theta } \right)} \right|_0^\pi } \right] }
= {\frac{{{\gamma _0}}}{2}\int\limits_0^R {\left( {R + r} \right)rdr} \int\limits_0^{2\pi } {d\varphi } \cdot \left( { - \cos \pi + \cos 0} \right) }
= {{\gamma _0}\int\limits_0^R {\left( {R + r} \right)rdr} \int\limits_0^{2\pi } {d\varphi } }
= {{\gamma _0}\int\limits_0^R {\left( {R + r} \right)rdr} \cdot 2\pi }
= {2\pi {\gamma _0}\int\limits_0^R {\left( {Rr + {r^2}} \right)dr} }
= {2\pi {\gamma _0}\left[ {\left. {\left( {\frac{{R{r^2}}}{2} + \frac{{{r^3}}}{3}} \right)} \right|_0^R} \right] }
= {2\pi {\gamma _0}\left( {\frac{{{R^3}}}{2} + \frac{{{R^3}}}{3}} \right) }
= {2\pi {\gamma _0}\frac{{5{R^3}}}{6} }
= {\frac{{5\pi {\gamma _0}{R^3}}}{3}.}
\]
Поскольку объем планеты равен \(\large\frac{4}{3}\normalsize \pi {R^3},\) то ответ можно записать и в такой форме:
\[M = \frac{{5\pi {\gamma _0}{R^3}}}{3} = \frac{5}{4}{\gamma _0}V.\]
Как видно, масса планеты на \(25\%\) больше по сравнению со случаем, когда плотность распределена однородно.
Массу планеты вычислим с помощью тройного интеграла по формуле:
\[M = \iiint\limits_U {dV} .\]
Переходя к сферическим координатам, получаем
\[
{M = \iiint\limits_U {dV} }
= {\iiint\limits_U {\gamma \left( r \right){r^2}\sin \theta drd\varphi d\theta } }
= {\iiint\limits_U {\frac{{R + r}}{{2r}}{\gamma _0}{r^2}\sin \theta drd\varphi d\theta } }
= {\frac{{{\gamma _0}}}{2}\int\limits_U {\left( {R + r} \right)r\sin \theta drd\varphi d\theta } }
= {\frac{{{\gamma _0}}}{2}\int\limits_0^R {\left( {R + r} \right)rdr} \int\limits_0^{2\pi } {d\varphi } \int\limits_0^\pi {\sin \theta d\theta } }
= {\frac{{{\gamma _0}}}{2}\int\limits_0^R {\left( {R + r} \right)rdr} \int\limits_0^{2\pi } {d\varphi } \cdot \left[ {\left. {\left( { - \cos \theta } \right)} \right|_0^\pi } \right] }
= {\frac{{{\gamma _0}}}{2}\int\limits_0^R {\left( {R + r} \right)rdr} \int\limits_0^{2\pi } {d\varphi } \cdot \left( { - \cos \pi + \cos 0} \right) }
= {{\gamma _0}\int\limits_0^R {\left( {R + r} \right)rdr} \int\limits_0^{2\pi } {d\varphi } }
= {{\gamma _0}\int\limits_0^R {\left( {R + r} \right)rdr} \cdot 2\pi }
= {2\pi {\gamma _0}\int\limits_0^R {\left( {Rr + {r^2}} \right)dr} }
= {2\pi {\gamma _0}\left[ {\left. {\left( {\frac{{R{r^2}}}{2} + \frac{{{r^3}}}{3}} \right)} \right|_0^R} \right] }
= {2\pi {\gamma _0}\left( {\frac{{{R^3}}}{2} + \frac{{{R^3}}}{3}} \right) }
= {2\pi {\gamma _0}\frac{{5{R^3}}}{6} }
= {\frac{{5\pi {\gamma _0}{R^3}}}{3}.}
\]
Поскольку объем планеты равен \(\large\frac{4}{3}\normalsize \pi {R^3},\) то ответ можно записать и в такой форме:
\[M = \frac{{5\pi {\gamma _0}{R^3}}}{3} = \frac{5}{4}{\gamma _0}V.\]
Как видно, масса планеты на \(25\%\) больше по сравнению со случаем, когда плотность распределена однородно.
Решение.
Расссмотрим подробнее закон изменения плотности. Если \(r = R,\) то
\[\gamma \left( R \right) = \frac{{R + R}}{{2R}}{\gamma _0} = {\gamma _0},\]
где \({\gamma_0}\) − некоторая поверхностная плотность планеты. Если \(r \to 0,\)
то \(\gamma \to \infty\) (рисунок \(6\)).
Рис.6