Метод функций Ляпунова
Определение функции Ляпунова
Функция Ляпунова представляет собой скалярную функцию, заданную на фазовом пространстве системы,
с помощью которой можно доказать устойчивость положения равновесия. Метод функций Ляпунова применяется
для исследования устойчивости различных дифференциальных уравнений и систем. Ниже мы ограничимся рассмотрением автономных систем
\[
{\mathbf{X'} = \mathbf{f}\left( \mathbf{X} \right)\;\;\text{или}}\;\;
{\frac{{d{x_i}}}{{dt}} = {f_i}\left( {{x_1},{x_2}, \ldots ,{x_n}} \right),}\;\;
{i = 1,2, \ldots ,n,}
\]
имеющих нулевое положение равновесия \(\mathbf{X} \equiv \mathbf{0}.\)
Предположим, что в некоторой окрестности \(U\) начала координат задана непрерывно дифференцируемая функция
\[V\left( \mathbf{X} \right) = V\left( {{x_1},{x_2}, \ldots ,{x_n}} \right).\]
Пусть \(V\left( \mathbf{X} \right)>0\) для всех \(\mathbf{X} \in U\backslash \left\{ \mathbf{0} \right\},\)
а в начале координат \(V\left( \mathbf{0} \right) = 0.\) Такими функциями являются, например, функции вида
\[
{V\left( {{x_1},{x_2}} \right) = ax_1^2 + bx_2^2,}\;\;
{V\left( {{x_1},{x_2}} \right) = ax_1^2 + bx_2^4,}\;\;
{a,b>0.}
\]
Найдем полную производную функции \(V\left( \mathbf{X} \right)\) по времени \(t:\)
\[
{\frac{{dV}}{{dt}} = \frac{{\partial V}}{{\partial {x_1}}}\frac{{d{x_1}}}{{dt}} + \frac{{\partial V}}{{\partial {x_2}}}\frac{{d{x_2}}}{{dt}} + \cdots }
+ {\frac{{\partial V}}{{\partial {x_n}}}\frac{{d{x_n}}}{{dt}}.}
\]
Это выражение можно записать в виде скалярного произведения двух векторов:
\[
{\frac{{dV}}{{dt}} = \left( {\text{grad}\,V,\frac{{d\mathbf{X}}}{{dt}}} \right),\;\;\text{где}\;\;}
{V = \left( {\frac{{\partial V}}{{\partial {x_1}}},\frac{{\partial V}}{{\partial {x_2}}}, \ldots ,\frac{{\partial V}}{{\partial {x_n}}}} \right),}\;\;
{\frac{{d\mathbf{X}}}{{dt}} = \left( {\frac{{d{x_1}}}{{dt}},\frac{{d{x_2}}}{{dt}}, \ldots ,\frac{{d{x_n}}}{{dt}}} \right).}
\]
Здесь первый вектор представляет собой градиент функции \(V\left( \mathbf{X} \right),\)
т.е. он всегда направлен в сторону наибольшего возрастания функции \(V\left( \mathbf{X} \right).\) Как правило, функция \(V\left( \mathbf{X} \right)\)
возрастает при удалении от начала координат, т.е. при условии \(\left| \mathbf{X} \right| \to \infty .\)
Второй вектор в скалярном произведении − это вектор скорости движения. В любой точке он направлен по касательной к фазовой траектории.
Рассмотрим случай, когда производная функции \(V\left( \mathbf{X} \right)\) в окрестности \(U\) начала координат отрицательна:
\[\frac{{dV}}{{dt}} = \left( {\text{grad}\,V,\frac{{d\mathbf{X}}}{{dt}}} \right)<0.\]
Это означает, что угол \(\varphi\) между вектором градиента и вектором скорости больше \(90^\circ.\) Для функции двух переменных
это схематически показано на рисунках \(1\) и \(2.\)
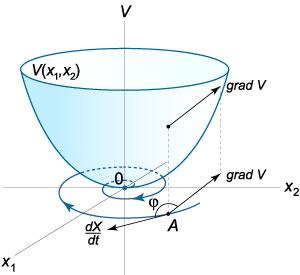
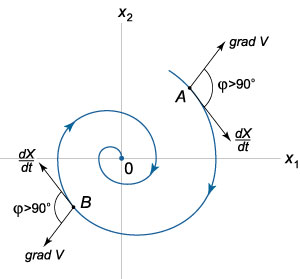
Рис.1
Рис.2
\(V\left( \mathbf{X} \right)>0\) для всех \(\mathbf{X} \in U\backslash \left\{ \mathbf{0} \right\}\);
\(V\left( \mathbf{0} \right) = 0\);
\({\large\frac{{dV}}{{dt}}\normalsize} \le 0\) для всех \(\mathbf{X} \in U\).
Теоремы об устойчивости
Теорема об устойчивости в смысле Ляпунова.
Если в некоторой окрестности \(U\) нулевого решения \(\mathbf{X} = \mathbf{0}\) автономной системы существует
функция Ляпунова \(V\left( \mathbf{X} \right),\) то положение равновесия \(\mathbf{X} = \mathbf{0}\)
является устойчивым по Ляпунову.
Теорема об асимптотической устойчивости.
Если в некоторой окрестности \(U\) нулевого решения \(\mathbf{X} = \mathbf{0}\) автономной системы
существует функция Ляпунова \(V\left( \mathbf{X} \right)\) с отрицательно определенной производной
\({\large\frac{{dV}}{{dt}}\normalsize}<0\) для всех \(\mathbf{X} \in U\backslash \left\{ \mathbf{0} \right\},\)
то положение равновесия \(\mathbf{X} = \mathbf{0}\) является асимптотически устойчивым.
Как видно, для асимптотической устойчивости нулевого решения требуется, чтобы полная производная \({\large\frac{{dV}}{{dt}}\normalsize}\) была строго
отрицательной (отрицательно определенной) в окрестности начала координат.
Теоремы о неустойчивости
Теорема Ляпунова о неустойчивости.
Пусть в окрестности \(U\) нулевого решения \(\mathbf{X} = \mathbf{0}\) существует непрерывно дифференцируемая функция
\(V\left( \mathbf{X} \right),\) такая, что
\(V\left( \mathbf{0} \right) = 0\);
\({\large\frac{{dV}}{{dt}}\normalsize}>0\).
\(V\left( \mathbf{X} \right)>0\) для всех \(\mathbf{X} \in {U_1}\backslash \left\{ \mathbf{0} \right\}\);
\({\large\frac{{dV}}{{dt}}\normalsize}>0\) для всех \(\mathbf{X} \in {U_1}\backslash \left\{ \mathbf{0} \right\}\);
\(V\left( \mathbf{X} \right) = 0\) для всех \(\mathbf{X} \in \delta {U_1},\) где \(\delta {U_1}\) обозначает границу подобласти \({U_1}\).
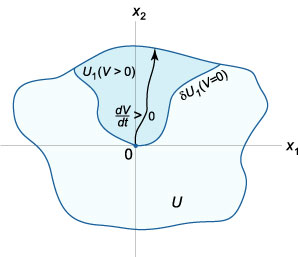

Рис.3
Рис.4
Пример 1
Исследовать на устойчивость нулевое решение системы
\[\frac{{dx}}{{dt}} = - 2x,\;\;\frac{{dy}}{{dt}} = x - y.\]
Решение.
Данная система представляет собой линейную однородную систему с постоянными коэффициентами. В качестве функции Ляпунова возьмем
квадратичную форму
\[V\left( \mathbf{X} \right) = V\left( {x,y} \right) = a{x^2} + b{y^2},\]
где коэффициенты \(a, b\) подлежат определению.
Очевидно, что функция \(V\left( {x,y} \right)\) всюду положительна, кроме начала координат, где она равна нулю. Вычислим полную производную функции
\(V\left( {x,y} \right):\)
\[
{\frac{{dV}}{{dt}} = \frac{{\partial V}}{{\partial x}}\frac{{dx}}{{dt}} + \frac{{\partial V}}{{\partial y}}\frac{{dy}}{{dt}} }
= {2ax\left( { - 2x} \right) + 2by\left( {x - y} \right) }
= { - 4a{x^2} + 2bxy - 2b{y^2} }
= { - 2b\left( {\frac{{4a}}{{2b}}{x^2} - xy + {y^2}} \right) }
= { - 2b\left( {\frac{{2a}}{b}{x^2} - xy + {y^2}} \right).}
\]
Выражение в скобках можно преобразовать в квадрат разности, если выполняется условие
\[\frac{{2a}}{b} = \frac{1}{4}\;\;\text{или}\;\;8a = b.\]
Мы можем взять любую подходящую комбинацию, например, положим \(a = 1,\) \(b = 8.\) Тогда
производная принимает вид:
\[
{\frac{{dV}}{{dt}} = - 16\left( {\frac{{{x^2}}}{4} - xy + {y^2}} \right) }
= { - 16{\left( {\frac{x}{2} - y} \right)^2}<0.}
\]
Таким образом, для данной системы существует функция Ляпунова, причем ее производная всюду отрицательна за исключением начала координат. Следовательно,
нулевое решение системы асимптотически устойчиво (устойчивый узел).
Пример 2
Исследовать на устойчивость нулевое решение системы
\[\frac{{dx}}{{dt}} = y,\;\;\frac{{dy}}{{dt}} = - x.\]
Решение.
Заметим, что для данной системы метод первого приближения неприменим, поскольку нулевое решение представляет собой "центр" (т.е. система
не является грубой):
\[
{A = \left( {\begin{array}{*{20}{r}}
0&1\\
{ - 1}&0
\end{array}} \right),}\;\;
{\det \left( {A - \lambda I} \right) = 0,}\;\;
{\Rightarrow \left| {\begin{array}{*{20}{c}}
{ - \lambda }&1\\
{ - 1}&{ - \lambda }
\end{array}} \right| = 0,}\;\;
{\Rightarrow {\lambda ^2} + 1 = 0,}\;\;
{\Rightarrow {\lambda _{1,2}} = \pm i.}
\]
Воспользуемся методом функций Ляпунова для анализа устойчивости. Пусть функция \(V\left( \mathbf{X} \right)\) имеет вид
\[V\left( \mathbf{X} \right) = V\left( {x,y} \right) = {x^2} + {y^2}.\]
Вычислим производную функции \(V\left( \mathbf{X} \right)\) в силу данной системы:
\[
{\frac{{dV}}{{dt}} = \frac{{\partial V}}{{\partial x}}\frac{{dx}}{{dt}} + \frac{{\partial V}}{{\partial y}}\frac{{dy}}{{dt}} }
= {2x \cdot y + 2y \cdot \left( { - x} \right) \equiv 0.}
\]
Таким образом, производная тождественно равна нулю. Следовательно, функция \(V\left( \mathbf{X} \right)\) является функцией Ляпунова
и нулевое решение системы устойчиво в смысле Ляпунова. Условие асимптотической устойчивости здесь не выполняется (для этого
производная \({\large\frac{{dV}}{{dt}}\normalsize}\) должна быть отрицательной).
Пример 3
Исследовать на устойчивость нулевое решение нелинейной системы
\[\frac{{dx}}{{dt}} = - x{y^2},\;\;\frac{{dy}}{{dt}} = 3y{x^2}.\]
Решение.
Очевидно, что якобиан данной системы в точке \(\left( {0,0} \right)\) представляет собой нулевую матрицу:
\[\require{AMSmath.js}
J = {\left. {\left( {\begin{array}{*{20}{c}}
{\frac{{\partial {f_1}}}{{\partial x}}}&{\frac{{\partial {f_1}}}{{\partial y}}}\\
{\frac{{\partial {f_2}}}{{\partial x}}}&{\frac{{\partial {f_2}}}{{\partial y}}}
\end{array}} \right)} \right|_{\substack{
x = 0\\
y = 0}}} = \left( {\begin{array}{*{20}{c}}
0&0\\
0&0
\end{array}} \right).\]
Собственные значения этой матрицы равны нулю: \({\lambda _{1,2}} = 0.\) Поэтому
метод исследования устойчивости по первому приближению
неприменим.
Посмотрим какой результат можно получить, используя функцию Ляпунова. В качестве такой функции возьмем
\[V\left( \mathbf{X} \right) = V\left( {x,y} \right) = 3{x^2} + {y^2},\]
которая является положительно определенной всюду, кроме начала координат. Вычислим полную производную:
\[
{\frac{{dV}}{{dt}} = \frac{{\partial V}}{{\partial x}}\frac{{dx}}{{dt}} + \frac{{\partial V}}{{\partial y}}\frac{{dy}}{{dt}} }
= {6x\left( { - x{y^2}} \right) + 2y\left( {3y{x^2}} \right) }
= { - 6{x^2}{y^2} + 6{x^2}{y^2} \equiv 0.}
\]
Здесь снова, как и в предыдущем примере, производная тождественно равна нулю. Это значит, что нулевое решение системы
устойчиво (в смысле Ляпунова).
Пример 4
Исследовать на устойчивость нулевое решение системы, используя метод функций Ляпунова:
\[\frac{{dx}}{{dt}} = y - 2x,\;\;\frac{{dy}}{{dt}} = 2x - y - {x^3}.\]
Решение.
В качестве возможной функции Ляпунова выберем функцию вида
\[V\left( \mathbf{X} \right) = V\left( {x,y} \right) = {\left( {x + y} \right)^2} + \frac{{{x^4}}}{2}.\]
Очевидно, эта функция является положительно определенной всюду, кроме начала координат, где она равна нулю.
Вычислим ее производную (в силу данной системы):
\[\require{cancel}
{\frac{{dV}}{{dt}} = \frac{{\partial V}}{{\partial x}}\frac{{dx}}{{dt}} + \frac{{\partial V}}{{\partial y}}\frac{{dy}}{{dt}} }
= {\left( {2x + 2y + 2{x^3}} \right)\left( {y - 2x} \right) + \left( {2x + 2y} \right)\left( {2x - y - {x^3}} \right) }
= {\cancel{\left( {2x + 2y} \right)\left( {y - 2x} \right)} + 2{x^3}\left( {y - 2x} \right) }
- {\cancel{\left( {2x + 2y} \right)\left( {y - 2x} \right)} - {x^3}\left( {2x + 2y} \right) }
= {\cancel{2{x^3}y} - 4{x^4} - 2{x^4} - \cancel{2{x^3}y} = - 6{x^4} \le 0.}
\]
Как видно, производная является отрицательно определенной всюду, кроме точки \(\left( {0,0} \right).\) Тогда нулевое решение
будет асимптотически устойчивым.
Используя метод первого приближения,
можно убедиться, что нулевое положение равновесия представляет собой устойчивый фокус. Действительно,
собственные значения линеаризованной системы являются комплексно-сопряженными числами с отрицательной действительной частью:
\[
{J = \left( {\begin{array}{*{20}{r}}
1&{ - 2}\\
2&{ - 1}
\end{array}} \right),}\;\;
{\det \left( {J - \lambda I} \right) = 0,}\;\;
{\Rightarrow \left| {\begin{array}{*{20}{c}}
{1 - \lambda }&{ - 2}\\
2&{ - 1 - \lambda }
\end{array}} \right| = 0,}\;\;
{\Rightarrow {\left( {\lambda + 1} \right)^2} + 4 = 0,}\;\;
{\Rightarrow {\left( {\lambda + 1} \right)^2} = - 4,}\;\;
{\Rightarrow \left| {\lambda + 1} \right| = \pm 2i,}\;\;
{\Rightarrow {\lambda _{1,2}} = - 1 \pm 2i.}
\]
Пример 5
Используя функцию Ляпунова, исследовать на устойчивость нулевое решение системы
\[\frac{{dx}}{{dt}} = x + 3y,\;\;\frac{{dy}}{{dt}} = 2x.\]
Решение.
Возьмем в качестве функции \(V\left( \mathbf{X} \right)\) следующую функцию:
\[V\left( \mathbf{X} \right) = V\left( {x,y} \right) = 2{x^2} - 3{y^2}.\]
Выбор коэффициентов будет ясен из последующих преобразований. Вычислим полную производную функции \(V\left( \mathbf{X} \right)\)
в силу данной системы:
\[
{\frac{{dV}}{{dt}} = \frac{{\partial V}}{{\partial x}}\frac{{dx}}{{dt}} + \frac{{\partial V}}{{\partial y}}\frac{{dy}}{{dt}} }
= {4x\left( {x + 3y} \right) - 6y\left( {2x} \right) }
= {4{x^2} + \cancel{12xy} - \cancel{12xy} = 4{x^2}>0.}
\]
Таким образом, производная \({\large\frac{{dV}}{{dt}}\normalsize}\) является положительно определенной всюду, кроме начала координат.
С другой стороны, можно найти точки, сколь угодно близкие к нулю, в которых функция \(V\left( \mathbf{X} \right)\) также будет положительной.
Такие точки, например, расположены на оси \(Ox\) при \(y = 0.\)
Как видно, выполнены условия теоремы Ляпунова о неустойчивости. Следовательно, нулевое решение системы неустойчиво.
Пример 6
Исследовать на устойчивость нулевое решение системы
\[\frac{{dx}}{{dt}} = {x^3} + y,\;\;\frac{{dy}}{{dt}} = x + {y^3}.\]
Решение.
Исходя из вида правых частей уравнений, можно заметить, что производные \({\large\frac{{dx}}{{dt}}\normalsize},\) \({\large\frac{{dy}}{{dt}}\normalsize}\)
будут возрастать для точек в первом квадранте плоскости \(Oxy\) (при \(x>0,\) \(y>0\)). Поэтому можно
предположить, что система является неустойчивой. Для доказательства воспользуемся теоремой Четаева.
Пусть функция \(V\left( \mathbf{X} \right)\) имеет вид
\[V\left( \mathbf{X} \right) = V\left( {x,y} \right) = {x^2} - {y^2}.\]
Эта функция является положительно определенной в подобласти \({U_1},\) в которой выполняется неравенство \(\left| x \right|>\left| y \right|\)
(см. выше рис.\(4\)). Вычислим производную \({\large\frac{{dV}}{{dt}}\normalsize}\) в силу данной системы
и определим ее знак в подобласти \({U_1}.\)
\[
{\frac{{dV}}{{dt}} = \frac{{\partial V}}{{\partial x}}\frac{{dx}}{{dt}} + \frac{{\partial V}}{{\partial y}}\frac{{dy}}{{dt}} }
= {2x\left( {{x^3} + y} \right) - 2y\left( {x + {y^3}} \right) }
= {2{x^4} + \cancel{2xy} - \cancel{2xy} - 2{y^4} }
= {2\left( {{x^4} - {y^4}} \right).}
\]
Видно, что производная \({\large\frac{{dV}}{{dt}}\normalsize}\) также является положительно определенной в подобласти \({U_1},\) определяемой
соотношением \(\left| x \right|>\left| y \right|.\) Кроме того, функция \(V\left( \mathbf{X} \right)\) равна нулю на границе
области \({U_1},\) включая точку \(\left( {0,0} \right).\) Таким образом, выполняются все условия теоремы Четаева. Следовательно, нулевое
решение системы неустойчиво.
Вычислив собственные значения якобиана линеаризованной системы, можно убедиться, что нулевое положение равновесия является седлом:
\[
{J = {\left. {\left( {\begin{array}{*{20}{c}}
{\frac{{\partial {f_1}}}{{\partial x}}}&{\frac{{\partial {f_1}}}{{\partial y}}}\\
{\frac{{\partial {f_2}}}{{\partial x}}}&{\frac{{\partial {f_2}}}{{\partial y}}}
\end{array}} \right)} \right|_{\substack{
x = 0\\
y = 0}}} }
= {{\left. {\left( {\begin{array}{*{20}{c}}
{3{x^2}}&1\\
1&{3{y^2}}
\end{array}} \right)} \right|_{\substack{
x = 0\\
y = 0}}} }
= {\left( {\begin{array}{*{20}{c}}
0&1\\
1&0
\end{array}} \right);}
\]
\[
{\det \left( {J - \lambda I} \right) = 0,}\;\;
{\Rightarrow \left| {\begin{array}{*{20}{c}}
{ - \lambda }&1\\
1&{ - \lambda }
\end{array}} \right| = 0,}\;\;
{\Rightarrow {\lambda ^2} - 1 = 0,}\;\;
{\Rightarrow {\lambda ^2} = 1,}\;\;
{\Rightarrow {\lambda _{1,2}} = \pm 1.}
\]